系统环境
- ubuntu2004
- ros noetic
依赖
- ROS1/ROS2
- PCL
- OpenCV
- GTSAM 优化库
- Ceres 优化库
- Iridescence 图形化显示
- SuperGlue [optional]
安装
Install dependencies
sudo apt install libomp-dev libboost-all-dev libglm-dev libglfw3-dev libpng-dev libjpeg-devInstall GTSAM
git clone https://github.com/borglab/gtsam
cd gtsam && git checkout 4.2a9
mkdir build && cd build
# For Ubuntu 22.04, add -DGTSAM_USE_SYSTEM_EIGEN=ON
cmake .. -DGTSAM_BUILD_EXAMPLES_ALWAYS=OFF \
-DGTSAM_BUILD_TESTS=OFF \
-DGTSAM_WITH_TBB=OFF \
-DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF
make -j$(nproc)
sudo make install如果报错重新安装或者检查gtsam是否重复安装
libdirect_visual_lidar_calibration.so: undefined symbol: _ZNK5gtsam15NonlinearFactor5rekeyERKSt6vectorImSaImEEldd install/lib/libdirect_visual_lidar_calibration.so
Install Ceres
git clone --recurse-submodules https://github.com/ceres-solver/ceres-solver
cd ceres-solver
git checkout e47a42c2957951c9fafcca9995d9927e15557069
mkdir build && cd build
cmake .. -DBUILD_EXAMPLES=OFF -DBUILD_TESTING=OFF -DUSE_CUDA=OFF
make -j$(nproc)
sudo make installInstall Iridescence for visualization
git clone https://github.com/koide3/iridescence --recursive
mkdir iridescence/build && cd iridescence/build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j$(nproc)
sudo make installInstall SuperGlue (Optional)
Warning
SuperGlue is not allowed to be used for commercial purposes. You must carefully check and follow its licensing conditions.
pip3 install numpy opencv-python torch matplotlib
git clone https://github.com/magicleap/SuperGluePretrainedNetwork.git
echo 'export PYTHONPATH=$PYTHONPATH:/path/to/SuperGluePretrainedNetwork' >> ~/.bashrc
source ~/.bashrcBuild direct_visual_lidar_calibration ATTACH
# ROS1
cd ~/catkin_ws/src
git clone https://github.com/koide3/direct_visual_lidar_calibration.git --recursive
cd .. && catkin_make
# ROS2
cd ~/ros2_ws/src
git clone https://github.com/koide3/direct_visual_lidar_calibration.git --recursive
cd .. && colcon build编译报错
CMake Error at /usr/local/lib/cmake/iridescence/iridescence-config.cmake:43 (add_library):
add_library cannot create ALIAS target "Iridescence::Iridescence" because
target "Iridescence::iridescence" is imported but not globally visible.解决方法
https://github.com/koide3/direct_visual_lidar_calibration/issues/120
https://github.com/koide3/direct_visual_lidar_calibration/issues/94
/usr/bin/ld: cannot find -lfmt
make: *** [Makefile:141: all] Error 2解决方法
sudo apt-get install libfmt-dev运行
预处理 ATTACH
rosrun direct_visual_lidar_calibration preprocess --data_path /data/cjtong/rosbag/calibros1用户如果跑livox数据集livox_ros1.tar.gz会报错
[ERROR] [1742887033.079032080]: Client [/rostopic_815016_1742887029912] wants topic /camera_info to have datatype/md5sum [sensor_msgs/CameraInfo/c9a58c1b0b154e0e6da7578cb991d214],
but our version has [sensor_msgs/CameraInfo/b5aff04250fbf270b71bef9d82c2132e]. Dropping connection.解决办法 https://github.com/koide3/direct_visual_lidar_calibration/issues/25
相机内参可以通过plotjuggler查看
rosrun direct_visual_lidar_calibration preprocess -av --camera_model plumb_bob --camera_intrinsic 1452.711762456289,1455.877531619469,1265.25895179213,1045.818593664107 --camera_distortion_coeffs -0.04203564850455424,0.0873170980751213,0.002386381727224478,0.005629700706305988,-0.04251149335870252 /data/cjtong/rosbag/calib /data/cjtong/rosbag/calib
粗标
- 自动
rosrun direct_visual_lidar_calibration find_matches_superglue.py /data1/cjtong/ros_ws/rosbag/calib
rosrun direct_visual_lidar_calibration initial_guess_auto /data/cjtong/rosbag/calib- 手动
rosrun direct_visual_lidar_calibration initial_guess_manual /data/cjtong/rosbag/calib精标 ATTACH
rosrun direct_visual_lidar_calibration calibrate /data/cjtong/rosbag/calib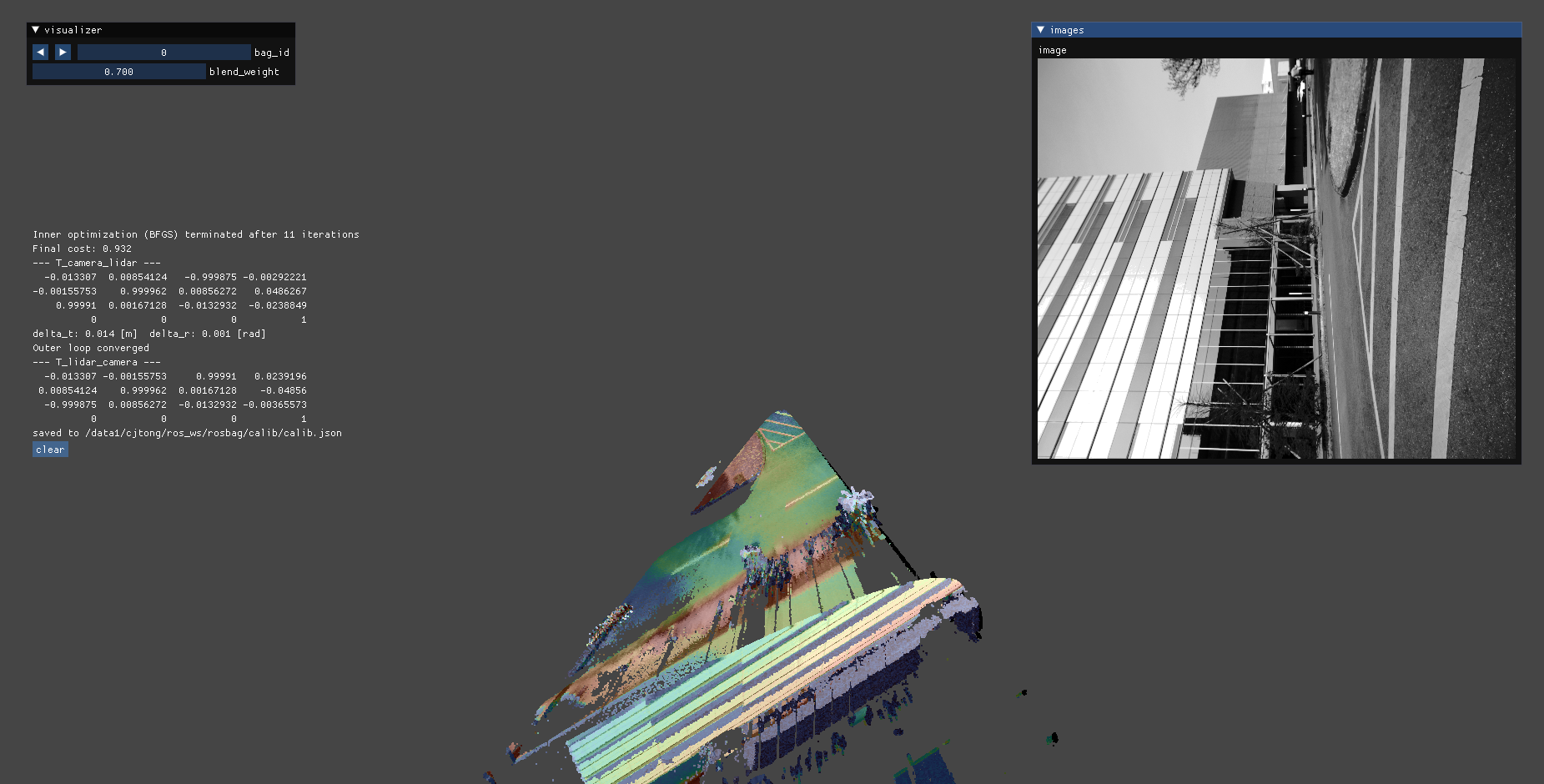
结果
校准完成后,打开/data/cjtong/calib/calib.json文件。
标定结果T_lidar_camera: [x, y, z, qx, qy, qz, qw],将相机帧中的3D点转换为LiDAR帧(即p_lidar = T_lidar_camera * p_camera)。 calib.json还包含相机参数,手动/自动初值结果(init_T_lidar_camera和init_T_lidar_camera_auto),以及一些元数据。
心得体会
- 标定包不能太大,iridescence 会非常卡顿
参考
https://koide3.github.io/direct_visual_lidar_calibration/
https://github.com/koide3/direct_visual_lidar_calibration
https://staff.aist.go.jp/k.koide/assets/pdf/icra2023.pdf
「真诚赞赏,手留余香」
 CJ.Tong Blog
CJ.Tong Blog真诚赞赏,手留余香
使用微信扫描二维码完成支付

comments powered by Disqus